
なんか、小さな機体にケーブルを這いまわしているので混乱しないように整理。
やっぱ、外部電子コンパスとアナログRSSIの関係で複雑な配線になってしまってる。
ただ、今のところ他に手がないんだよね。
まず、僕の場合の前提条件として
・受信器はPPM信号対応→HITEC MINIMA互換5CH小型受信機
・受信器からアナログRSSI出力→HITEC MINIMA互換5CH小型受信機
・外部電子コンパスはGPS受信器に搭載→Beitian BN-880
・GPSアシスト飛行できるフライトコントローラ→CC3D Revolution mini
・小さなOSD→CC3D Flight Controller Mini OP OSD
(ただのmicro minimOSDやminimOSDだとバッテリ電圧の分圧回路が
搭載されていないのでバッテリー電圧が正常表示されないから注意)
が必要。
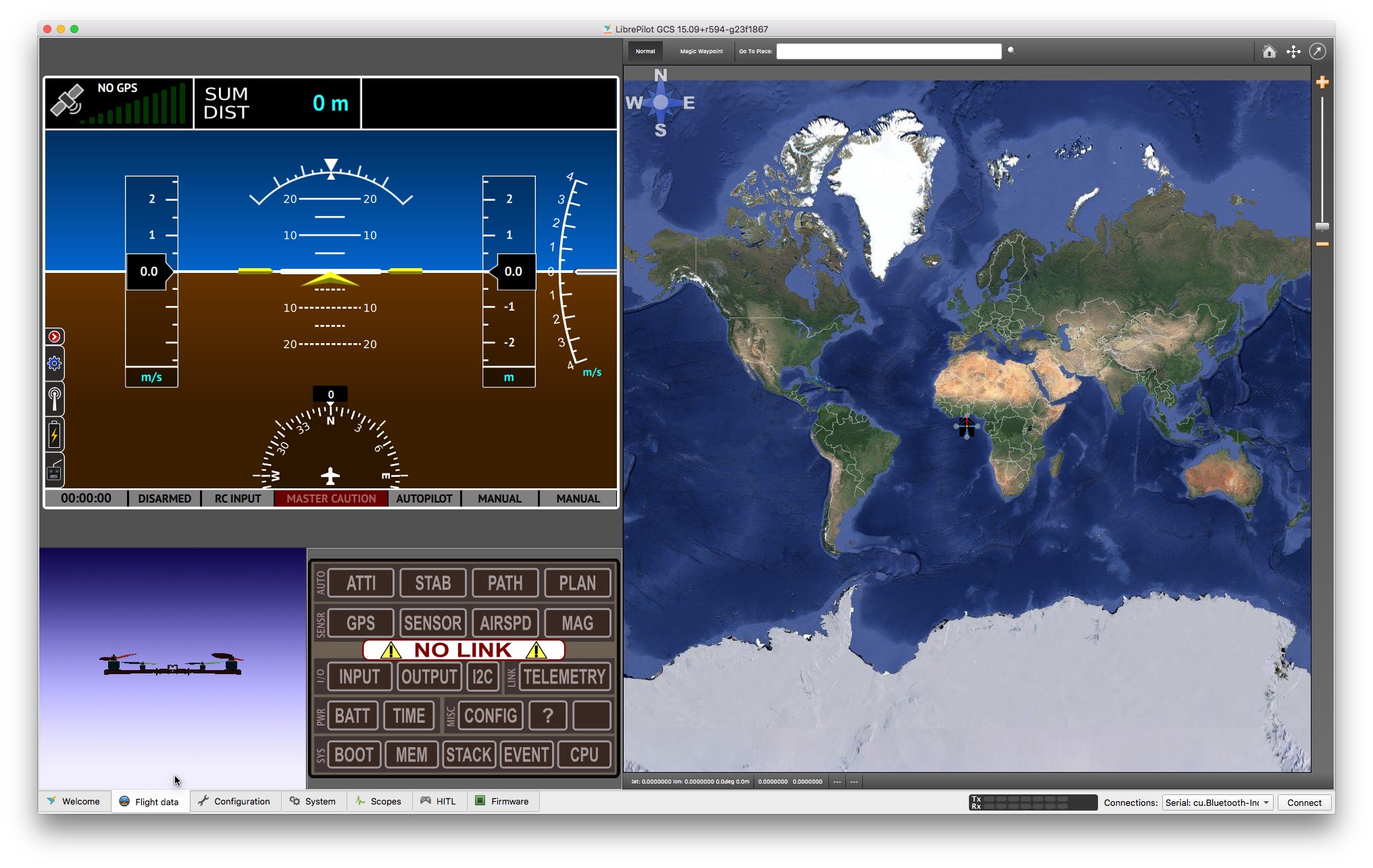
そして、LibrePilotGCSのConfigurationタブのHardwareの設定はこんな感じで
・レシーバーポートをPPM信号入力とOSD用のTelemetry信号出力
・MainポートをGPS信号入力
・Flexiポートを外部電子コンパス信号入力(I2C)
という設定にしている。

なので、送信機の設定も全てのチャンネルがPPM信号となっている。
受信機自体はPWM出力設定では5CHなんだけど、PPM出力設定にすると8CHになる。
1CHがPPM出力で2CHがPWM方式のRSSI出力。

そして、電子コンパスは外部電子コンパスのみ使う設定。

そして、実際の結線状態を整理した。

って感じ。
なのでOSDはアナログRSSIとアナログバッテリー電圧を入力する設定でコンパイルした
ファームウェアを使っている。
また、PWM方式RSSI信号をアナログ電圧のRSSI信号に変換するために抵抗とコンデンサー
を使っている。
実際は、絵のようにキレイな結線じゃなく
ESCとの結線やAVトランスミッターへの12V接続などがあるのでグチャグチャなんだよなぁ。
コメント