
先日の記事のようにLibrePIlotGCSの開発中の最新版でBN-880の外部電子コンパスの
キャリブレーションができず回避策を見つけたので屋外で確認をした。
ただ、先日Fly awayした時の強制墜落でRevolution miniのケースが割れるほどの衝撃を
機体に与えたので色々と不安だった。
![]()
結果から言うと、キャリブレーションは問題無し。
自宅で、AUX MAG調整値を全てゼロにして飛ばす場所に持って行きiPhoneで北の方向を
調べて電子コンパスのキャリブレーションをやるとバッチシできた。
その後、GPSアシスト飛行のテストもやった。
っが、何か変で機体が一方向に流れていく。
マニュアルモードでもGPSアシストでも流れる方向は同じなのでGPSアシストが原因では
なさそうなんだけどとにかく変。
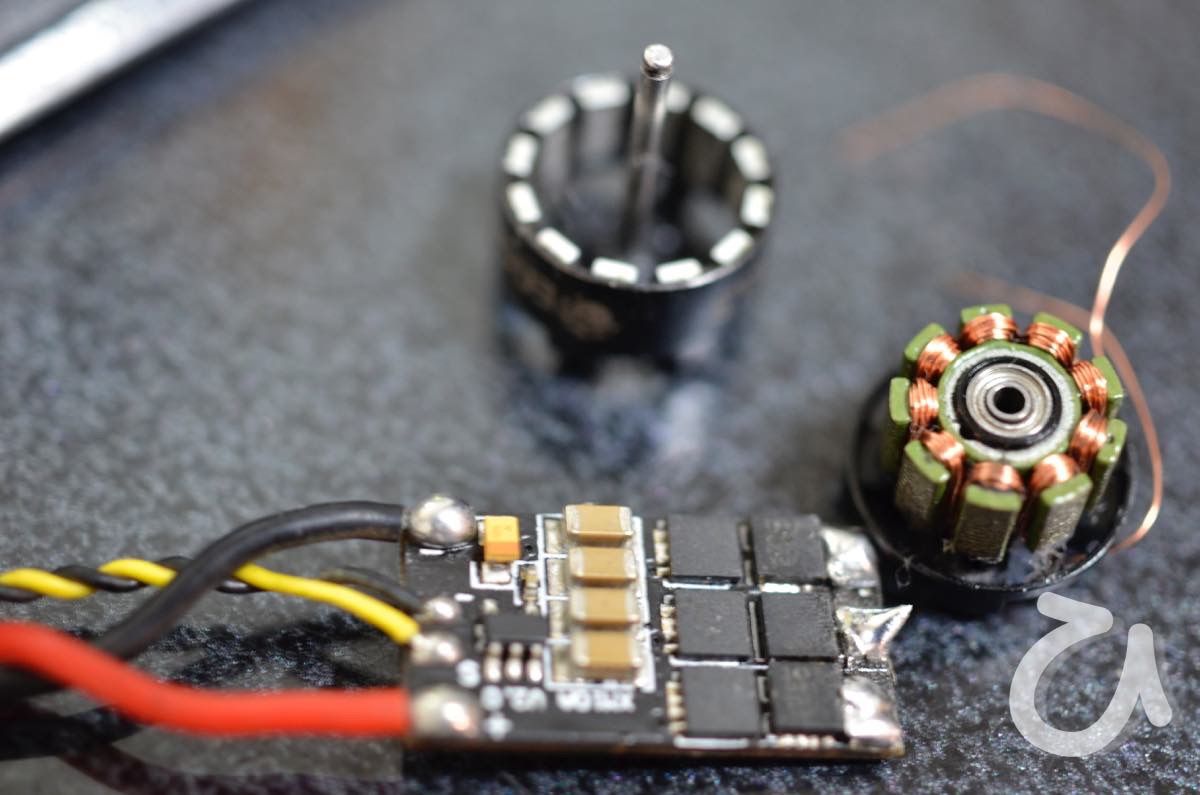
考えられるのはRevolution miniのケースをBonsai Lab BS01+で再造形したので基板の
水平とかがズレたのかもしれないなぁという予感。
それと、もう1つ大きな問題が・・・・
GPSアシスト+AltitudeVarioで高度維持飛行をすると機体が振動する。
今まで見たことが無い振動で右後方のプロペラが上下に周期的に振動している感じ。
こりゃ、設定っぽいなぁって思いつつ帰宅した。
帰宅後にLibrePilotGCSに接続して調べてみた。
まずは、外部電子コンパスへのモーター駆動時のノイズが乗っていないか確認してみた。
これは機体が片方向に流れていく原因が電子コンパスか否かの確認作業。

Revolution miniのオンボード電子コンパスはノイズで出力が大きく変化している。
外部電子コンパスとして使っているBN-880の電子コンパスの出力は一定なので問題無し。
なので設定値の確認することにし
LibrePilotGCSの設定の再確認をしてみると、Thrust PID ScalingがOFFになっていた。
たぶん、1回設定を全てリセットしたときにOFFになった可能性がある。
これ自体は機体の反応速度みたいなものにしか影響無いはず。
初心に返って各センサーの状態を確認する事にした。
GPSの接続無し設定に変更してジャイロや加速度計の情報で機体姿勢を判断する状態にし
状態を確認すると・・・・なぜか機体が15度傾いてる状態。
たぶん、機体が流れるのはこれを補正するためだったかも。
ってことでセンサーのキャリブレーションを順にやっていくとジャイロの調整が
おかしかった。
調整完了して室内でテスト飛行して問題なく飛べることを確認した。
最後にAltitudeVarioモードでの振動。
LibrePilotのフォーラムを探すとこんなスレッドがあった。
高度維持の動作の調整項目について議論していてサンプルとしてスクリーンショットが
載っていたので参考にして自分の調整値もいじってみた。
さすがにこれは室内でテストできないので日をあらためて屋外でやってみる予定。
コメント