
先日の記事でGPS受信機BN-880をとりあえず機体に載せて重量測定したら199.7gで
ギリギリ200g未満の機体重量になったって書いた。
そこで、BN-880保持部材の軽量化とケーブル長さの最適化での減量を検討した。

まずは、BN-880の軽量化をViaCADで検討してBonsai Lab BS01+で造形して球形状と
重量を比較してみた。
しかし、穴をあちこちに開けたにもかかわらず0.4gしか減量できなかった。
減形状が3.2g

穴ぼこだらけの新形状が2.8g

やはり、肉厚1mmまで追い込んで造形しているので保持部材での減量化は厳しい。
最後の追い込みで使える手段かもしれない。
なので、BN-880のケーブルをカットしてフライトコントローラCC3D Revolution miniに
少しの余長で到達する長さにしてみた。
その際に、次期バージョンのLibrePilotで正式対応される外部電子コンパスのケーブルも
正式なコネクタピンまで長さを適正化して接続した。
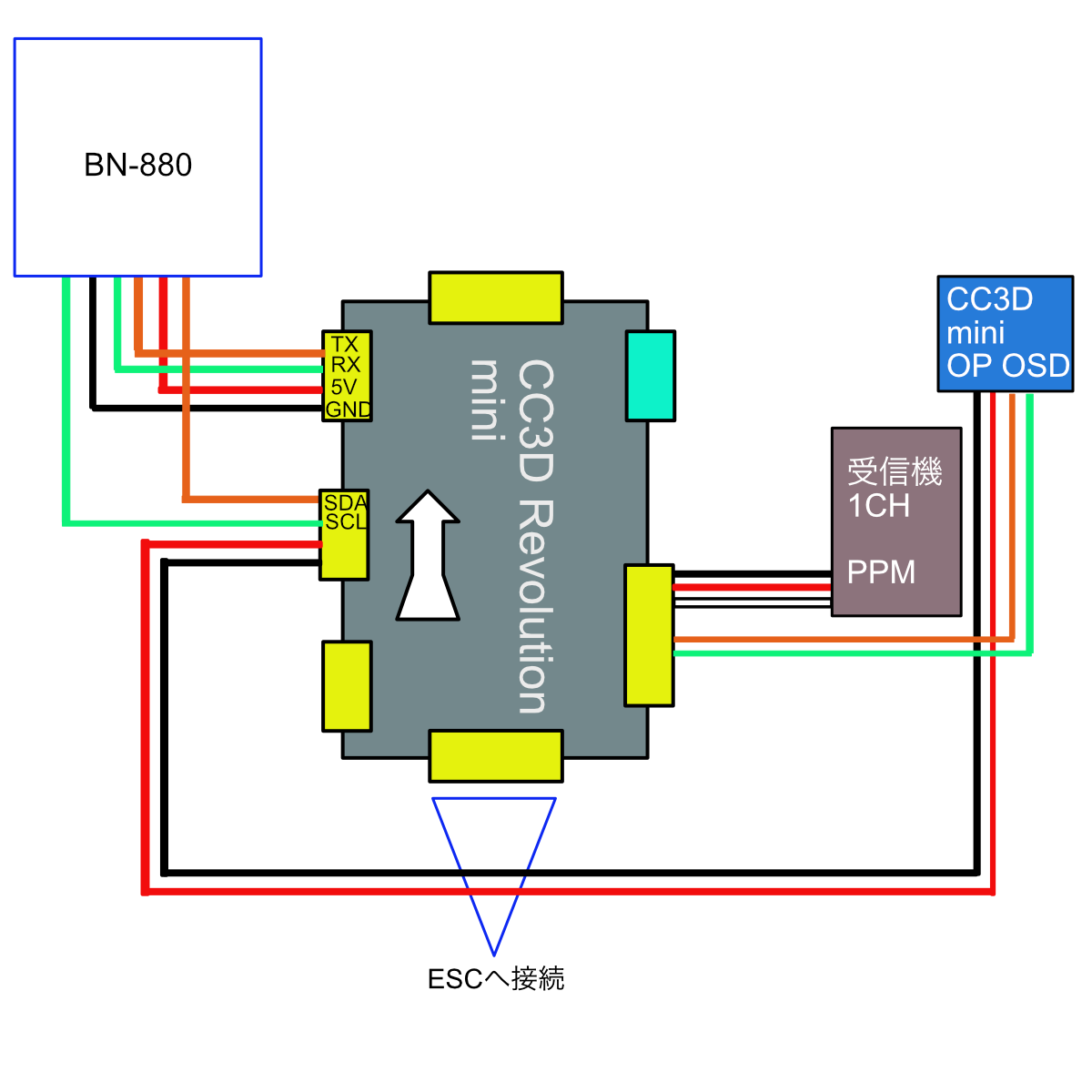
LibrePilotの説明図を借用するとこんな感じ。
ただ、うちのはCC3D Revolution miniなのでちょいとコネクタ位置が違うけどね。

Main PortにBN-880のGPS信号線の5V/GND/TX/RXを接続し、Flex PortにはBN-880に
搭載されている電子コンパスのSCA/SDLを接続する。
そして、Flex Portの5V/GNDをCC3D Mini OP OSDに接続する。
最後にReceiver PortのTX/RXをCC3D Mini OP OSDに接続して完了。
概略図で示すとこんな感じでケーブルをつないだ。

この状態でBN-880を保持部材に両面テープで固定して再度機体重量測定をしてみた。

無事、200gに少し余裕をもって完成した。
その後に、モータアーミング確認とかやって動作確認もほぼ完了。
あとは、飛行テストだけだ!!
コメント