
昨日、強風の中機体重量200g未満のクワッドコプターでGPSアシストモードのテストをした。
でも、風で流れているのかGPSアシストの性能なのかよく分からなかったので今日もテスト。
なんだけど・・・今日もそこそこ風が吹いていたんだよね。
まっ!昨日よりましだからテスト実行!!
しかし、想定外の不具合が発生してしまった。
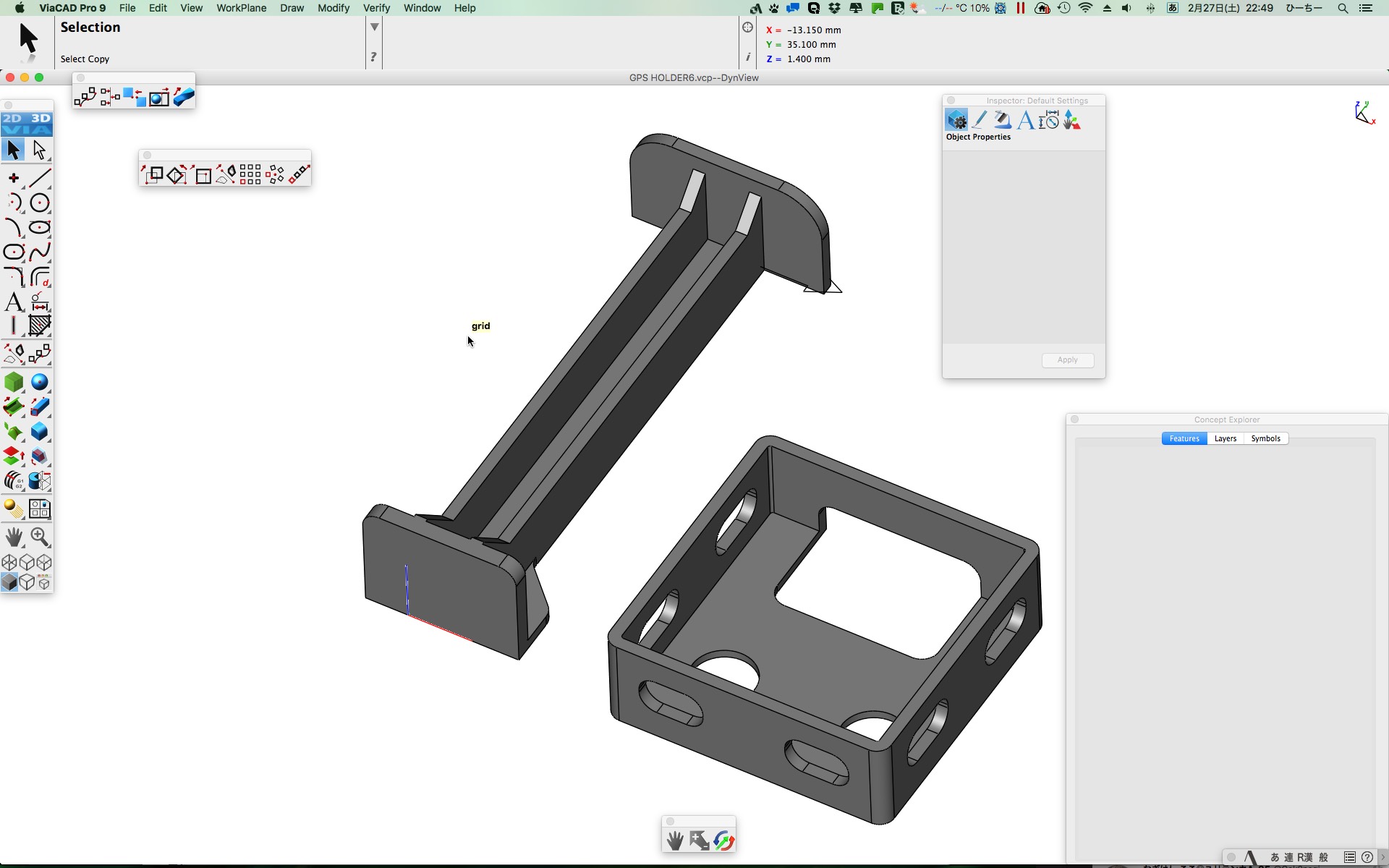
今回は、GPS受信機BN-880を固定する3Dプリンターで造形した部品をあえて墜落時には
外れるように両面テープ固定していた。
飛行中に木の枝にぶつかりそうになり緊急墜落させたたところ想定どおりに
GPS受信機BN-880を固定する部品が機体から外れたんだけど・・・・GPSのケーブルが
プロペラでずたずたに切断された。
もともと、GPS受信機BN-880が墜落時に壊れると再度造形するのがメンドーなので機体から
外れるようにしたんだけどケーブルの処理の方法が誤りだった。

GPS受信機BN-880のケーブルを空中配線していちゃプロペラに巻き込まれるよね。
完璧に自分の検討不足。
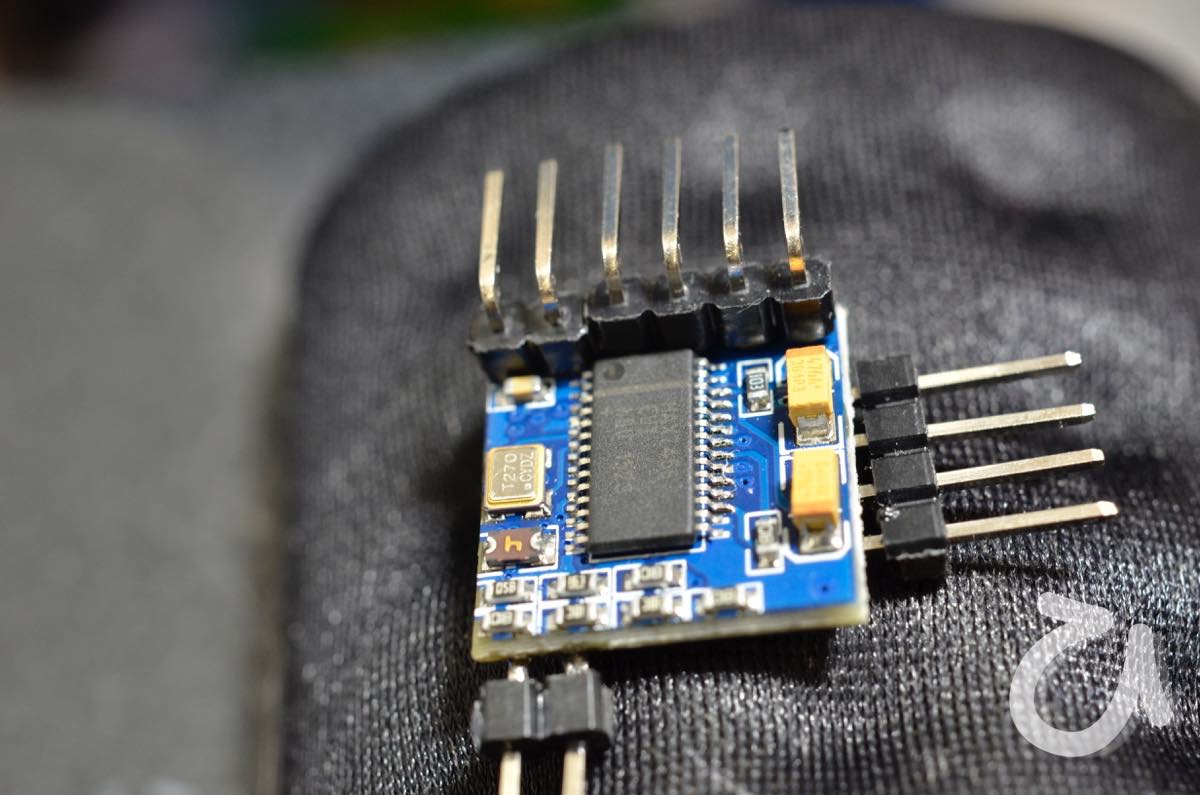
困ったことに、ケーブルの予備もないのでGPS受信機BN-880に各出力を直だしできるように
ランドが用意されているのでケーブルを半田付け。
あ、ちなみに機体の下にいつも写っているクリーム色の機器が
3DプリンターBONSAI LAB BS01+で、いつもこいつで部品を造形している便利な奴!!

そして、ケーブルはGPS受信機BN-880の固定部材の「コ」の字断面形状の部分に沿わせ
機体までおろし機体に入る部分はテープで補強+ナイロンバンドで固定した。
たぶん、これで大丈夫。

この状態で再度テスト飛行をやってみた。
GPSアシストモードでの飛行がいい感じだったのでいい気になって
GPSアシスト+Altitude Varioモードで気圧計での高度維持飛行をやってしまった。
結果、大失敗。
GPSなしでのAltitude Varioは以前問題なく飛行できることを確認済みだったんだけど
GPSアシストとの組み合わせはまだだった。
たぶん、250クラスの機体でCC3D Revolution miniやCC3D Revoを使ってる人は
参照できる機体がデフォルトで存在するから各種調整は難しくないと思う。
しかし、150クラスの機体ってお手本がないので試行錯誤。
Altitude Varioで使う設定値を振って実験するしかないみたい。
っで、今日のGPSアシストモードテストはこんな感じでした。
コメント