

先日から組み立てていた機体重量200g以下のクワッドの組み立てが8割方完了。
とりあえず飛ばすだけはできる状態になった。
昨日、部屋で離陸ホバリングテストをやったので今日は外で離陸させてみた。
一応、完成時の機体重量にするために電源をつながずFPV用カメラとAVトランスミッタ
それらを接続するケーブルを積んでギリギリ200g以下での初飛行。

どうせ何回も墜落するので落ち葉で敷き詰められている土の上で初飛行をさせた。
いやぁー、機体の反応が機敏すぎて操縦しにくかった。
あとで、よーく送信機のスイッチをみてみたら飛行モードが3なので難しい挙動をする
設定だったことが判明。そりゃ、難しいはずだ。
ただ、機体は安定していてホバリングだけは簡単。
そうはいっても風で流され当て舵がききすぎて苦戦してしまった。
対面状態では久々の対面操縦で少しパニクった。
最後の方で飛行が不安定になって悩んだんだけど帰宅して調べるとプロペラの固定ねじが
1カ所落下していて不安定だったみたい。
振動すごいからねじも緩むよなぁ。
帰宅後、機体重量を再確認したんだけど
バッテリーが仕様より6g重くなっていた。61gのはずが67gもありちょいと厳しい。
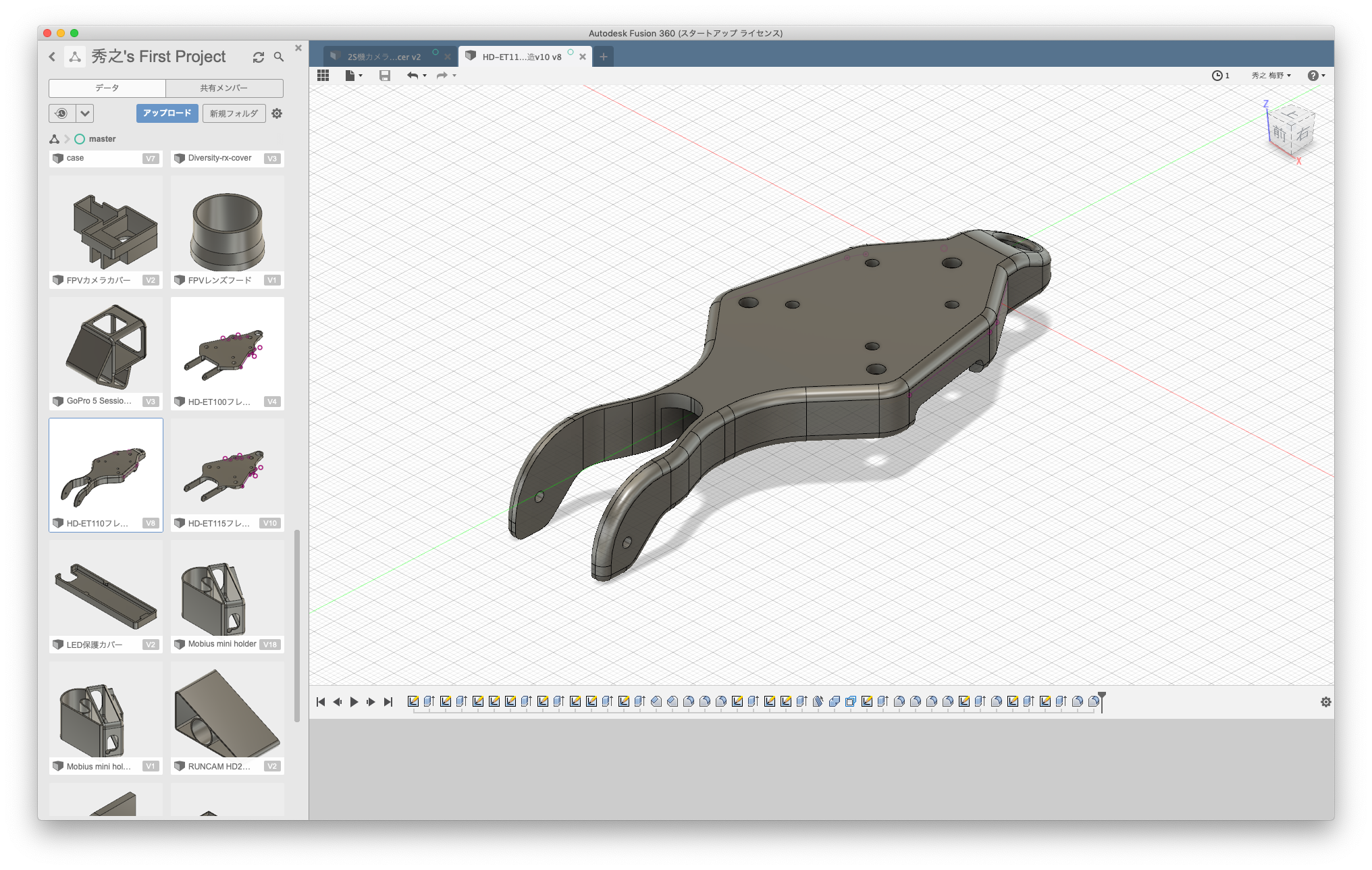
再度、表で計算したらGPSアンテナかMinimOSDどちらかしか載せられない。
何かダイエットして両方載せたいなぁ。
FPVカメラを小さいモノにしてフライトコントローラも小さいモノにすればいけるかも。
11mmかさ上げした部品もなくせるからかなりの減量になるはず。
もう少し悩みながら完成させよう!!
追記)
機体重量200g未満のクワッドコプターのフライトコントローラを変更して気圧計と
GPSを搭載し191.4gに収まった。
この記事に興味がある方は、この記事とこの記事を参照してください。
いろいろと軽量化とフル機能の両立は大変です。












コメントを残す