
先日からBN-880をCC3D Revolution miniに接続しBN-880内蔵の電子コンパスの設定と
使い方がわからず苦しんでいた。
今も苦しんでいるけどBN-880の内蔵電子コンパスのLibrePilotGCSでの設定方法が
やっとわかった。(多分正解だと思う)

そもそも、こんなに苦しんでいるのは機体重量200g未満のクワッドを作るために
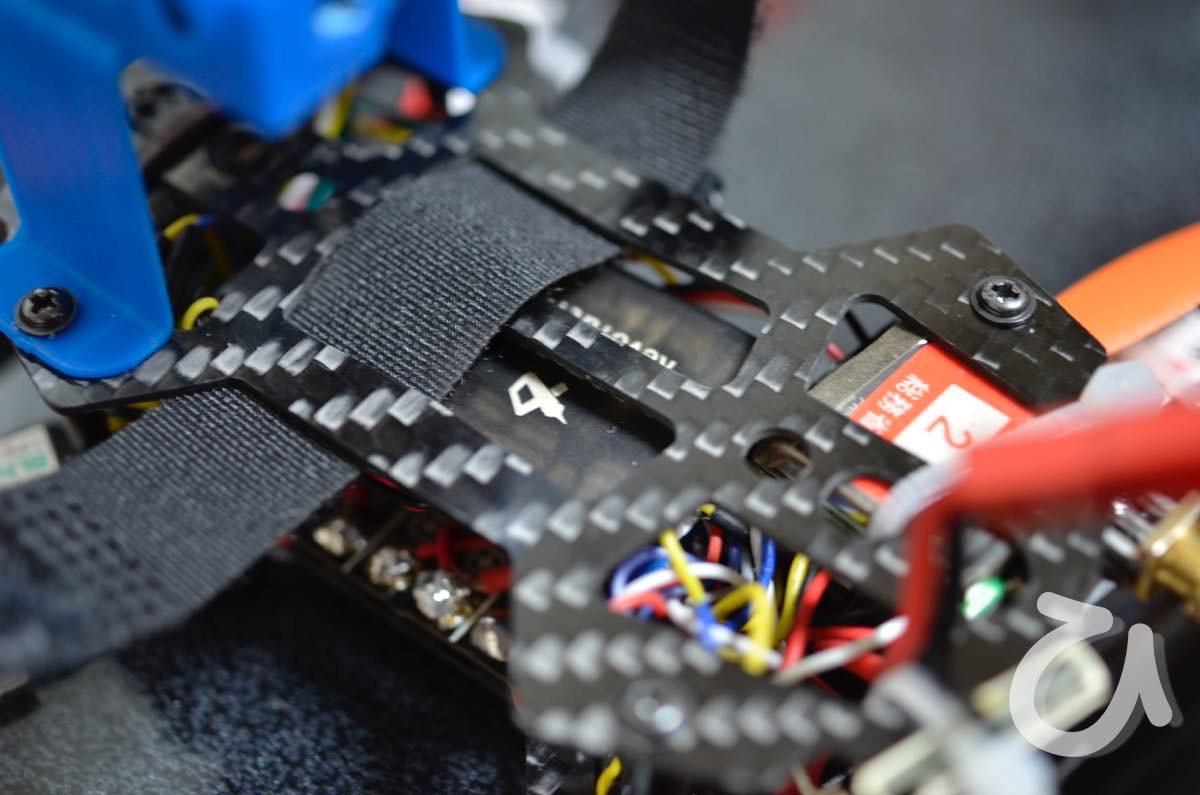
上のバナーのDiatone Blade 150mmフレームにGPSアシスト機能を使うためにGPS受信機
をBN-880にしたところから始まった。
このGPS受信機の取り付け方向は仕様書をみてもわかるように下の写真方向に取り付ける
のが正解なんだけど、(あ、これは僕のクワッドの写真です)

この方向ではCC3D Revolution miniの内蔵の電子コンパスとXYZ方向のXYについてのみ
出力がプラスマイナスが反転していてキャリブレーションしても正常に動作しない。
ネットで調べると、搭載している電子コンパス素子からCC3D Revolution miniとBN-880で
出力が真逆になっている事がわかった。
ただし、フライトコントローラがAPMなどでは電子コンパス素子の方向は合致しているので
ボードローテーション設定でROLL方向に180°回転設定のみで使える。
それが、CC3D RevoやCC3D Revolution miniでは電子コンパス素子がちゃんとメーカーの
推奨方向に向けて取り付けてあるので出力がプラスマイナス逆転してるっぽい。
ちなみにメーカー推奨はこれね

CC3DではY方向を機首方向にして電子コンパス素子が配置してある。
なので、CC3D RevoやCC3D Revolution miniではROLL方向に180°回転+いずれかの方向に
180°回転する必要がある。
頭で悩んでいてもしょうがないので設定を変更して確認したところこうなった。

そう、ROLL180°とYaw180°回転でCC3D Revolution mini内蔵の電子コンパスと出力が
ほぼ同じになりキャリブレーションの効果がちゃんとでる。
(Pitchのみ180°ってのが正解かもしれない→マニュアルに追記されていた)
また、UsageをBothとしているのは何回かMAGの安定性を確認すると
CC3D Revolution miniの内蔵電子コンパスとBN-880内蔵の電子コンパスを同時に
使用した方が周辺環境や通電時の環境の影響を受けにくいみたいだから。
※Bothは指定しない方が良いとフォーラムで書かれていました。
必ずAUXMAGを指定する事とのことです。
BOTHを指定すると外部電子コンパスがNGの時自動で通常の電子コンパスに切り替わり
ノイズの影響を受ける状態になるのでダメとのことでした。

ピンクの縦方向の線はAUX/On boardの表示切り替えなので出力波形ではなく
その区間に上下に小さく値が触れているので両方の電子コンパスの出力を交互に検出
判断している波形。
→LibrePilotのフォーラムで外部電子コンパス使用時はAUX Onlyを選択のことと
投稿があったのでAUX Onlyを選択すべき。
その後(右側)はBN-880の内蔵コンパスのみの出力波形を示している。
ここまでくるとテスト飛行もできそうなんだけど重大な不具合が開発中最新版ファームでは
あるような気がする。
OSDにGPS捕捉数とモータ回転可否情報が表示されない。
GPS捕捉数は常時ゼロでモータ回転はできない状態のままとなっている。
なので、OSD画面からは飛行できるのかどうかわからない。
改善項目もある。
室内でGPSを捕捉して7個以上になっても飛行可能になるとは限らない。
GPSでの位置精度をみているようで離陸前の静止状態にGPSでの情報から少しずつ
移動していると誤検知していると判断するとGPSはオレンジ点灯になりモータ回転を
させてくれない。
まずは、OSDの件についてLibrePilotのフォーラムや開発者の議論をみて対応状況を
確認しているところなんだけど今のところ不明。
もしかすると僕だけの不具合かもという恐れもある。

コメント