
今週は、とある資格の技能講習を受けていてヘロヘロ。
今日は、一日中ムッチャ寒い中屋外で実技講習を受けたので全身が筋肉痛みたい。
金曜日まで実技講習なので帰宅しても気力が無い。
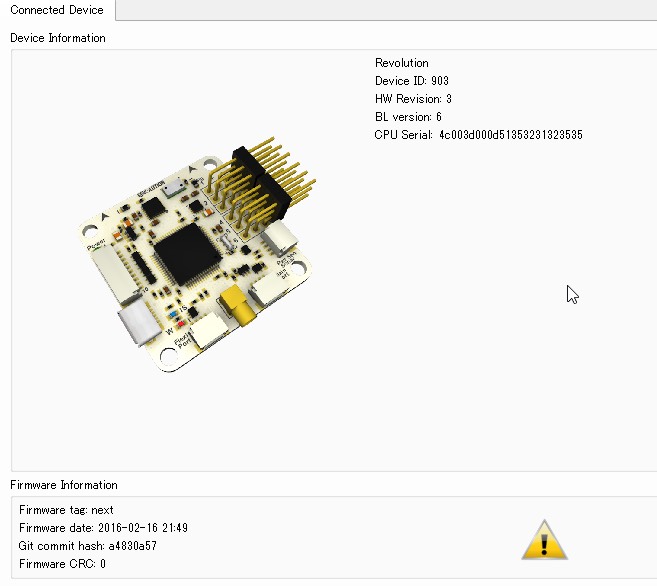
なんだけど、LibrePilotGCSの開発版2016/2/16バージョンで新たな方式のGPS受信機を
接続出来使えるようになった。
なんと、DJI方式のGPS受信機(アンテナ)が使えるようになったのだ!!
そもそも、この追加機能のお話は
このeBayで売っている安価なDJI用NeoM8N受信機(アンテナ)を使いたい!!っていう
要望から検討が始まり実装されたみたい。
そういうことで、僕も早速”git pull”して最新版ソースを入手してBuildしパッケージ化した。
ちゃんと、ファームウェアもアップデートされてたので適用!!

ただ、僕自身はeBayで売っている安価なDJI用NeoM8N受信機(アンテナ)を持っていないので
動作検証はできないけど設定できる機能は実装されていた。
Vehicle設定ウィザードは今まで通りのU-Blox/UMEA/U-Blox+MagとOpenpilotが
選択可能のままでこの項目ではDJIか否かは関係ない。

っで、外部電子コンパスのポートもFlex Portに追加でI2Cが選択可能になっていた。
しかし・・・I2C専用ポートってあったっけ?
電圧/電流/ソナーなどのセンサーポートがI2Cポートなのかなぁ。
この設定項目でDJIが追加選択可能になっていた。
DJIってGPS信号と電子コンパス信号を混合で取り扱ってたんだっけ?
とすると、DJI用NeoM8N受信機(アンテナ)を接続すれば外部コンパス用に2ピンを
余計に使わなくていいのかも。
ちょいといいかも。

それと、地味な改善項目もあった。
外部コンパスを使用するときにCC3D Revoに搭載のOn board Magと外部電子コンパスの
AuxMag両方のデータを使用する設定の”Both”を選択すると、
今までは常に両方の出力を読んでいたのが、ワーニング状態になった方の出力は捨てて
しまうせっていになったみたい。

機体の場所を移動させワーニング状態をこいに作ると両方データ仕様状態と正常データ側のみ
使用する状態に動的に変化する。
なんか、これでMagワーニング出にくくなりそうな気がしてうれしい。










コメントを残す