
200g以下のクワッド組み立て中なんだけど、昨日の記事で書いたようにCC3Dを
ストレートピンタイプにしたために天井とサーボコネクタが干渉し組み立てられない。
そこで、サーボ 延長ケーブルで対応しようと考え購入した。
しかし、ちょいと考え方を変えて素直に天井を11mm高くすればいいんじゃない!?
って思い急遽3DプリンターBonsaiLab BS01+でかさ上げ用スペーサを作った。
構造的にどうみても下側の剛性で十分機体を維持できているので、天井はバッテリーなどを
載せる棚みたいなモノって考えることにした。
なので、単純にアルミの支柱を上方向に延長すれば重要増以外は問題無い。
購入したサーボ 延長ケーブルはもったいないが保管しておこう。

この部品を3DプリンターBonsaiLab BS01+でちゃちゃっと造形。

どうせオモチャあつかいの200g以下の機体重量クワッドなので青色フィラメントを
使って作ってしまった。
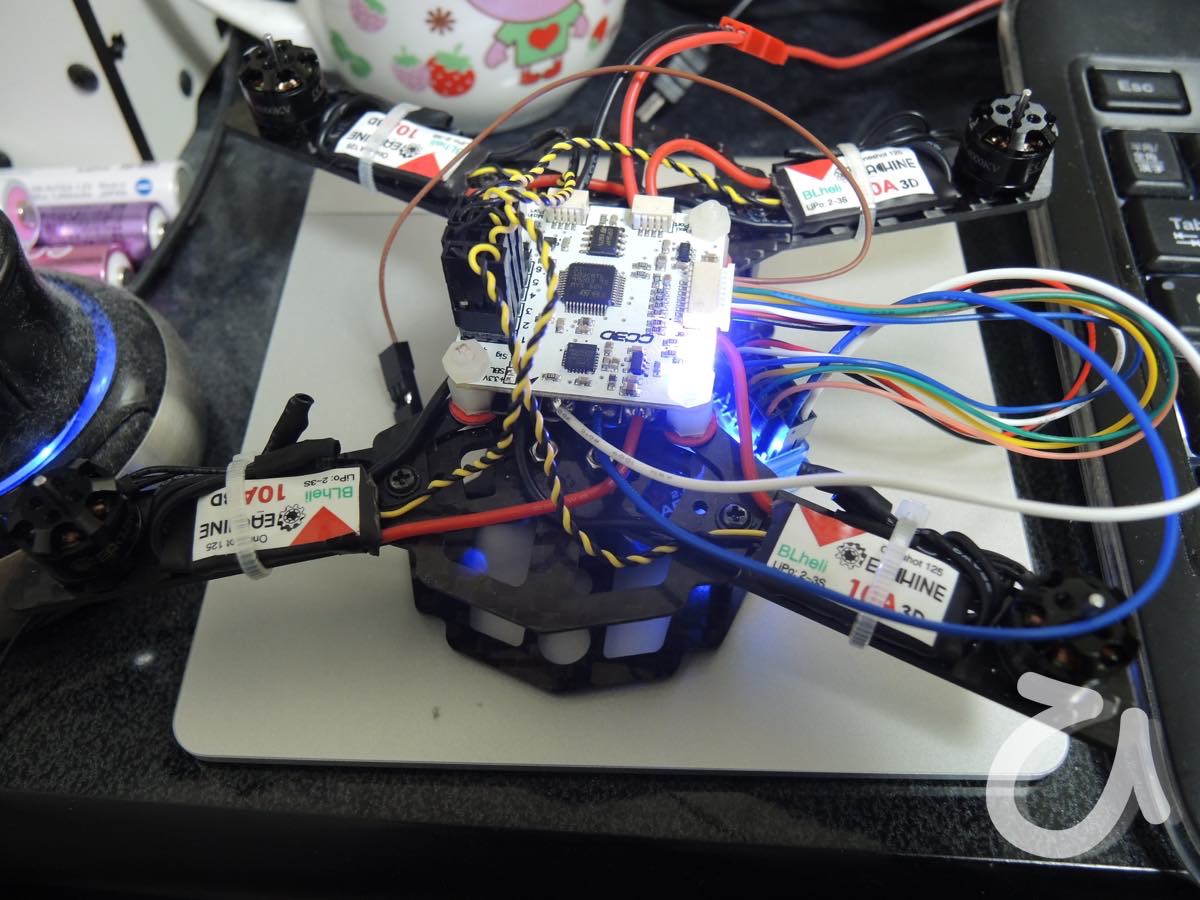
っで、できたのはこんな感じの機体。

って感じで飛ばすための最低限の状態まで組み立てることができた。
なので、室内で離陸とホバリング短時間確認をしようと決めて布団の上で離陸実験を
することにした。
しかし・・・結果は無残。
離陸するためにスロットルをあげると機体は時計回りや反時計回りにグルグルまわる。
無理矢理離陸したらクルクルまわったままでホバリング。
不安定で家具にプロペラがぶつかり一枚折れた。
現象から考えるとジャイロの異常だって思いキャリブレーションを数回やった。
それでも直らないのでうー・・・・って悩んで思いついた。
実は、モータの回転方向を指定方向に対して全て逆回転で作ってしまってたんだよね。
でも、回転方向は違うけど左右と前後で反対方向回転なので打ち消し合い問題無しって
考えて放置をしていた。
こりゃ、半田付けやり直しかな・・・って思いガックリしながらOpenPilot GCSを
さわっているとモータの回転方向を逆回転指示できる事がわかった。

![]() Reverse all Motorsってチェックを入れてSaveして再度離陸実験をしてみた。
Reverse all Motorsってチェックを入れてSaveして再度離陸実験をしてみた。
その結果は問題無し!!離陸とホバリングが正常にできた。
モータの回転方向の組み合わせも機体安定制御で重要な条件だとわかり納得。
ちゃんと指示通りのモータ回転方向にしないとダメって事ですね。
ここまでやって機体重量測定をしてみた。
とりあえず飛べる最低限の装備での重量を測ってみると、161.6g。

これにFPV用カメラとトランスミッタおよびケーブルを載せると、195g。

GPSアンテナを諦めてOSDは載せれるかも。
もう少し考えて減量しないとダメな気がする。
コメント