
DJI NAZA M V2のファームウェアが4.04そして4.06とアップしたのでテスト飛行。
そして、世の中のマルチコプターへの視線が厳しいので朝4時半にチャリンコで
テスト飛行場所へ向かい5時から準備開始した。
まぁ、恰好も怪しいかも。
だって、リュックからDJI F450の前腕2本が飛び出した状態でチャリンコだもん。
プロペラは外しているけど、ちょっと怪しいよね。
てなことやってたらサイコガンダム食玩などがでてた!!ちょいと欲しいがカミさんに怒られそう。

おっと、サイコガンダムの食玩はおいといて・・・・
飛ばす場所に到着し、まずはiPhoneアプリでBTUと接続し機体状態を確認。
あれ!!あれあれ・・・アプリがBluetooth検索に入るとクラッシュする。
何度やってもダメ。
原因は、iOSをiOS9Beta2にしていたからだった。
どんどん、OSをアップしていくとこんなとこで大問題になるんですね。
とりあえず、BTU接続はあきらめてコンパスのアライメントをやった。
機体をグルグルまわして正常に終了。
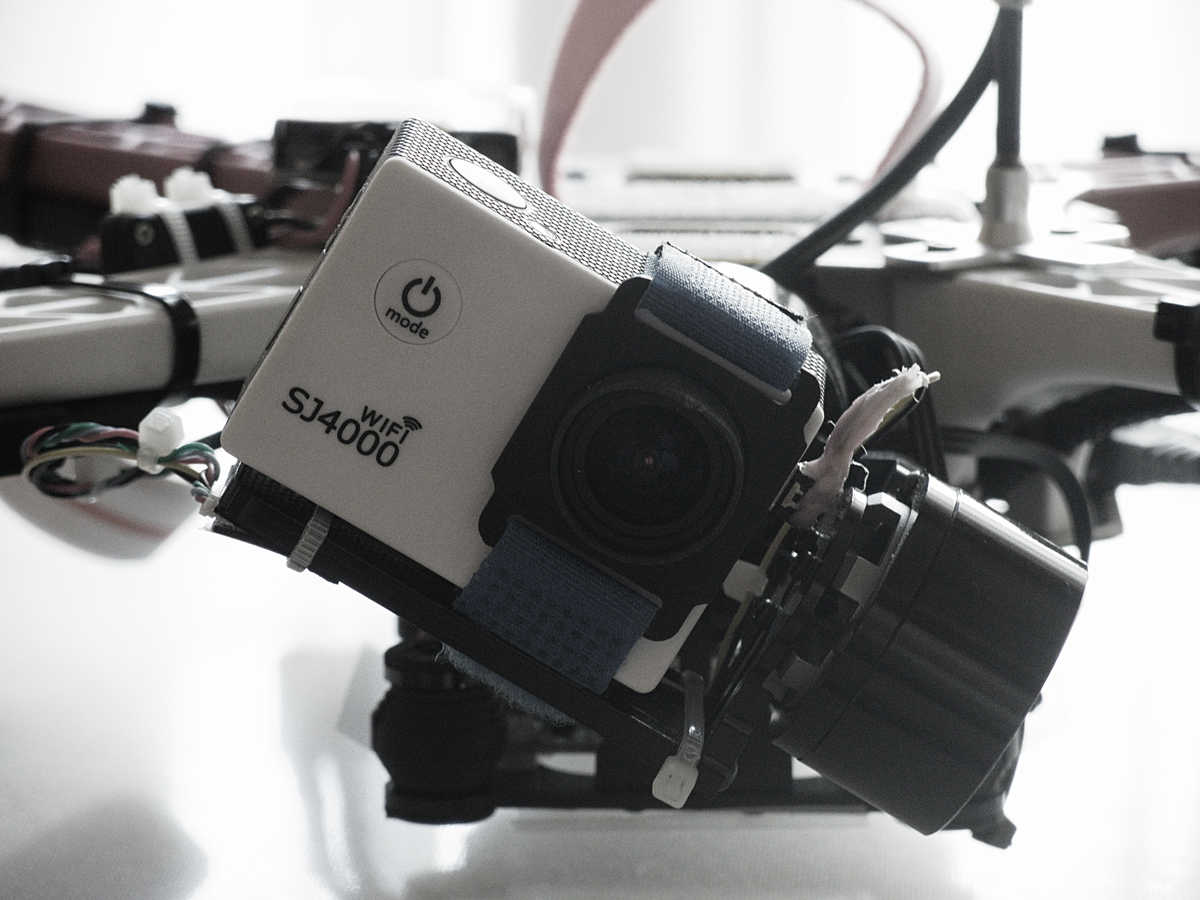
とりあえず機体は問題無い状態っぽかったのでSJ4000WiFiの電源をONした。
そして、映像出力をTVアウトにしてBOSCAM TS832経由で飛ばしたんだけど
FVPモニターRC732-DVRにはDJI IOSDminiが出力しているOSD画像と
minimOSDが出力しているコールサインのみ表示されてる。
SJ4000WiFiの映像は送信されていない。
その場ではケーブ類やコネクタの確認をしたんだけど原因がわからず
OSDの情報表示のみFPVモニターRC732-DVRに表示させてテスト飛行を開始。
調べるとSJ4000WiFiのファームウェアを最新版にしたことが原因で
TVアウトが機能していなかった。
この件は、こちらの記事に詳しく書いたので気になる人は読んでください。
また、TVアウトでの録画ボタンも機能しておらず空撮できてなかった。
最後に気になるDJI NAZA M V2のファームウェア4.06での飛行だけど
特におかしな挙動もなく以前と同じ感じで操縦できた。
ただ、GPSモードでのホバリングが衛星11個捕捉状態でも不安定な
気がしたから、コンパスキャリブレーションは長く時間がかかる方を
1回やった方がいいかもしれない。
自分的には飛行での変化は感じなくて問題無しと判断したんだけど
モータ停止時の挙動が依然と少し違う気がして違和感を感じてやばいなぁって
感覚的に思った。
プロポのスティックを両方とも移動させモータ起動と停止するんだけど
着陸時に徐々にスロットルをさげ着陸しプロポのスティックを中立にすると
以前は浮き上がらずに着陸状態でとどまっていた。
出も、今回はプロポのスティックを中立にすると若干浮いてしまう。
また、モータ停止をすると一瞬モータが高速で回り横転しそうになる。
モータの回転方向がわからないんだけどモータブレーキをかけるために逆転
させているとすると電流流れすぎ?って動きだった。
まずは、自分の機器の状態をキャリブレーションして後日に再度テスト飛行を
してみようと思う。
もしかすると、プロポのキャリブレーション情報などがキャンセルされている
可能性もあるからね。

コメント